Vor zirka 6 Jahren habe ich meinen ersten Außenläufer nach dem LRK-Prinzip gebaut und seit dem Zeitpunkt hat mich das Bauen der Motoren nicht mehr losgelassen.
Nach vielen guten Erfahrungen folgten natürlich auch ein paar Rückschläge. Aber was soll`s.
Da ich von Natur aus, bezüglich Technik, sehr neugierig bin und im Internet immer wieder nach Leuten mit Erfahrungen suchte, fand ich vor etwa 2 Jahren zufällig die Powercroco-Seite.
Diese wurde seit dem fast zu meiner täglichen Lektüre.
In meinen 30 Jahren Modellflug habe ich schon vieles gemacht.
Vom RC-1-Modell über die Schnuppi-Klasse bis hin zum Pylon-Rennen, welches ich 12 Jahre lang wettbewerbsmäßig geflogen habe.
Aber mein Interesse galt auch der Hubschrauber-Fliegerei.
Und vor ein paar Wochen fasste ich dann den Entschluss, einen direktgetriebenen Hubschrauber der 450er-Klasse zu bauen.
Einige Leute hatten sich ja bereits erfolgreich daran versucht.
Für meinen Versuch sollte ein 509 Stator, den ich noch liegen hatte, als Versuchskandidat dienen:
Motor: 12N16P 509
Stator: 50 mm Durchmesser 9 mm dick, 12 Nuten
Blechdicke: 0,5 mm
Glocke: 16 Polig (32 Magnete kaskadiert)
Rückschlußring: 2 mm dick
Magnete: 10x5x2 N38
Abdeckung: ~98% (starkes Rasten)
Draht: 1,0 mm, 13 Windungen je Zahn, Verschaltung im Stern
Motorwelle: 8 mm, der Freilauf ist mit der Glocke verschraubt
Leerlaufdaten: U=16,5 V; I=3,05 A; bei 6580 1/min; KV 398 U/V
Nun fehlte noch der Hubschrauber.
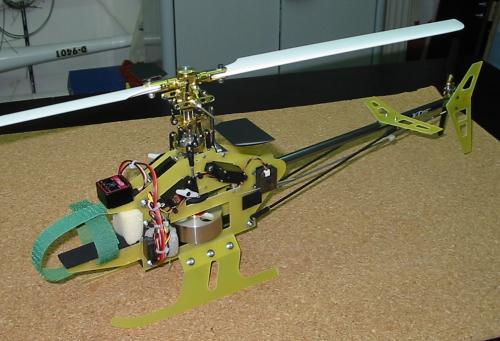
Da ich selbst in der Konstruktion tätig bin, beschloss ich, einen Heli auf Grundlage der käuflichen Hubschrauber wie T-Rex, KDS, Xcopter usw. selbst zu konstruieren.
Es sollte ein Heli mit einem Motor werden, wobei der Heckrotor mittels Zahnriemen angetrieben wird. Dieses ist konstruktiv die einfachere Variante, abgesehen von der mit 2 Motoren.
Den Haupt- uns Heckrotor habe ich direkt in Taiwan bestellt. Alle anderen Teile sind von KDS. Und ich denke, das Ergebnis kann sich sehen lassen.
Hier ein paar Eckdaten:
Rotordurchmesser: 700 mm
Blätter: CFK (Blattschmied)
Gewicht: 1000 gr (1235 gr mit Akku) plus UniLog
Akku: 4S1P 2200 mAh von SLS
Servos: 3 Stk. HS-85, 1 Stk. DES 477 BB
Kreisel: KDS 800
Regler: Schulze Value 12-40e
Fernsteuerung: MC-24 mit Spektrum AR6200
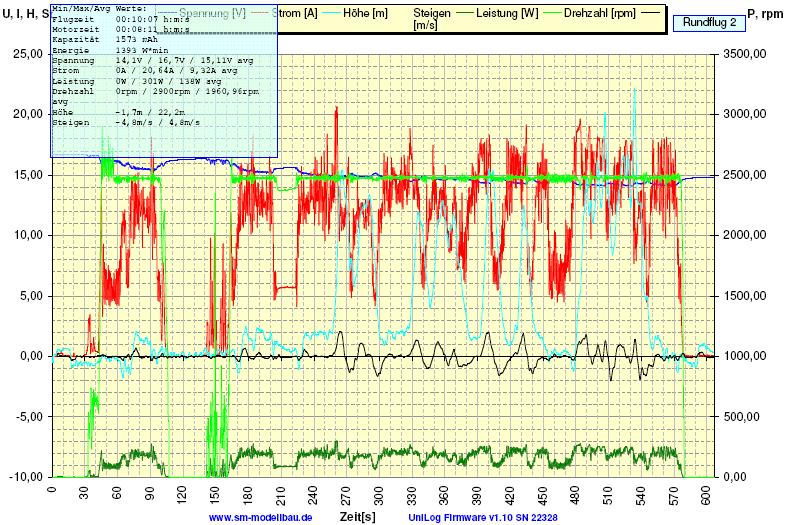
Der Regler wurde so umprogrammiert, dass er eine konstante Rotordrehzahl von 2500 1/min hat.
Funktioniert super klasse, auch wenn es kein offizieller Heliregler ist.
Nach dem der Heli nun fertig war, folgten die ersten Versuche.
Der Motor hatte keine Probleme, den Rotor auf die angestrebten 2500 1/min zu bringen.
Leistung satt, jedoch mit einem kleinem Wärmeproblem.
Etwas Abhilfe brachten hier die GFK-Plättchen, die ich in den Motor als Lüfterrad geklebt habe. So waren 10 Minuten Dauerbetrieb unter Last möglich.
Da ich den 4S-Betrieb gewählt habe, wurde nicht nur der Motor, sondern auch der Regler recht warm. D
urch Ändern der Gaskurve im Sender war es aber möglich, dass der Regler im Durchschnitt bei 20A lag.
Fliegen
Der Heli fliegt sehr ruhig, ist keineswegs träge und hat reichlich Leistung.
Und das Wichtigste: super leise. Das war eigentlich für mich ein ganz entscheidender Punkt.
Mit dem Akku kann man 9 Minuten Schwebeflug oder normal Herumfliegen, ohne Kunstflug (nach Timer).
Danach ist noch eine Restkapazität von zirka 300mAh im Akku.
Bezüglich Kunstflug kann ich noch nichts sagen. Dürfte aber kein Problem sein (normaler Kunstflug, kein 3D-Gehacke!!)
Die Auswertungen des UniLog ergaben, dass der Motor im Schwebeflug ca. 12 bis 15A aufnimmt (bei 2500 1/min).
Die Drehzahl wird gut konstant gehalten. Manchmal tut sich der Regler wegen des Autotiming beim Anlauf etwas schwer. Aber das ist für mich nebensächlich.
Bei starkem Steigen steigt der Strom bis auf ~45A (Schweben ca. 150 Watt, max. Pitch ca. 500 Watt).
In der Summe betrachtet ist das bis jetzt ein voller Erfolg.
Ich würde mal sagen, bei dem Heli handelt es sich um eine gute Scale-Auslegung, auch wenn es hierfür kein Vorbild gibt.
Als nächster Schritt kommt ein anderer Motor zum Einsatz.
Den Stator hat mir freundlicher Weise Ralph zur Verfügung gestellt.
Es wird ein 24N32P 4216. Bei diesem strebe ich einem KV-Wert von 250 U/V an.
Und dann muß die Praxis zeigen wie sich der Heli damit verhält.
Weitere Projekte habe ich auch schon in Planung. Einen Heli mit jeweils einem Motor für den Haupt- und einem Motor für den Heckrotor. Der Rotordurchmesser wird ca. 1,2 m sein.
Man darf also gespannt sein.
Die Auslegung mit den guten 42er Blechen (mit freundlicher Unterstützung von Scorpion-Motors) sollte den antrieb effizienter, leichter und leistungsfähiger machen.