 |
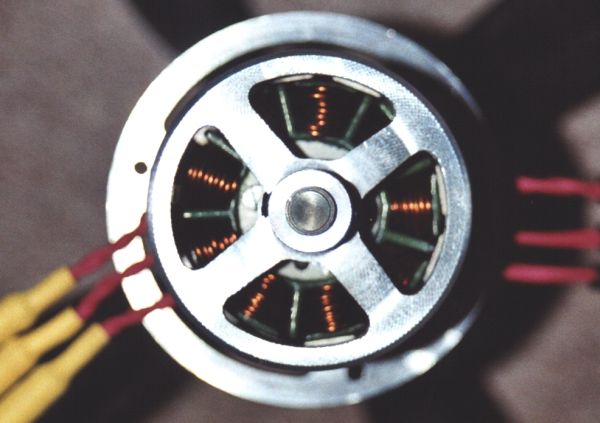
Erst hatte ich ja den "kleine" Gegenläufer-Ditto gebaut, quasi ein normaler "Kuni-Ditto". Basis waren meine Dreh-/Frästeile der normalen Serie (Magnetmaße 7,5 x 6 x 2,5). Einzig der Statorträger war dafür ausgelegt, zwei Statoren beiderseits des Flansches aufzunehmen. Dieser Motor hatte noch eine echte Hohlwelle, so wie sich das viele vorstellen. Diese musste aber innerhalb des (dafür) zu kurzen Statorträgers gelagert werden, was die Montage, Demontage und Wartung der Lager nicht eben einfacher macht. |
 |
Ausgelegt für 3S und anfangs Starrlatten, kam kein recht guter Wirkungsgrad zustande. Die Stufung der Propeller ist einfach zu grob, und es gibt zu enig Linkslauf-Propeller. So bin ich letztendlich auf Ramoser-Verstellpropeller gewechselt. Für den hinteren Prop 12C, für den vorderen eine 8B-Nabe, sowie 10"- bzw. 9"-Blätter. Damit fliegt seit Jahren meine "Lazy-Bee". |
  |
Hier 2 "Lazy-Bee-Bilder": Das Modell wiegt mit 3S 3300mah etwa 1,3kg. Der kleine Gegenläufer schafft es (gerade so) senkrecht zu ziehen. Insgesamt also keine schuboptimierte Angelegenheit. Und fürs Schnellfliegen ist das Modell eine Fehlanpassung . ..... Aber es macht Spaß! |
 |
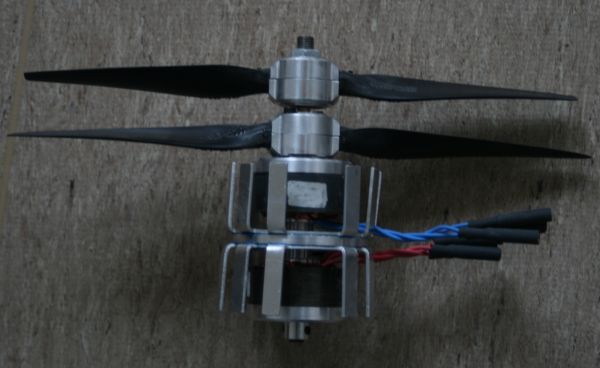
Der große Ditto-Gegenläufer: Er ist eine Adaption des "Kuni-Godzilla", mit derselben Wicklung. Die geht bei 5S prima mit 10-11"-Ramoser-Props. Aufgrund der Probleme mit der Hohlwelle am kleinen Gegenläufer wurde hier ein neuer Weg beschritten: die vordere Glocke-hinterer Prop-Kombination läuft in Kugellagern (eines im Glockenboden, eines in der Nabe) auf der Welle des anderen Motors. |
 |
Unklar war anfangs das Schwingungsverhalten des Motors. Dafür hat mir dankenswerterweise mein Schwager eine Schwingungsanalyse gemacht. Es gibt zwei schmale Resonanzen, die aber außerhalb des Drehzahlbandes liegen. Der Motor ist prima zu warten: der vordere Prop wird demontiert, danach kann die Glocke-Prop-Kombination abgezogen werden. Die Schubkräfte werden von dieser Glocke-Prop-Kombination über ein kurzes Stück Messingrohr vom Innenring des vorderen (Naben-)Lagers an die vordere Nabe übergeben, die sie dann per Welle an die Kugellager im Statorträger übergibt. Insgesamt also unkritisch. |
 |
Leider war der Motor thermisch instabil: die Oberfläche reichte nicht aus, die Wärme, die in den Statoren entstand (schlechte Blech-Qualität), abzuleiten. Radiallüfter gab esfür uns) damals noch nicht im Motorenbau, deshalb kam ich auf die Idee mit den Fingerkühlern. Damit ging es dann.
Leider hatte ich nie ein Flugzeug für den großen Ditto-Gegenläufer, so dass er schlussendlich an Raimund Sonst (Nurflügel-Modelltechnik) verkauft wurde. |
 |
So, zum HK-4015 "CR":
Die "Ausgangslage" ist die Sebart-Macchi MC-72:
Ich wurde letztes Jahr von einem befreundeten Wasserflieger gefragt, was es für Gegenläufer am Markt gibt. |
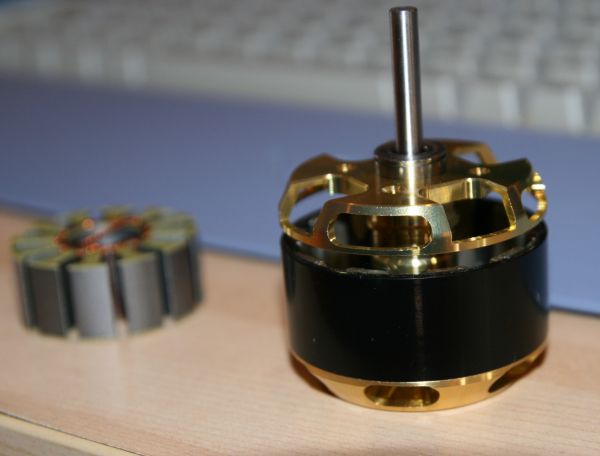 |
Ausgewählt wurde der HK-4015 als Kit. Letztendlich wurde die Ramoser-12C-Nabe doch etwas anders an der Glocke befestigt; siehe 3D-PDF aus der letzten Mail. Wir kamen so mit weniger Teilen aus... Gewickelt ist er mit 6+4+1 Windungen Y mit 1,32er Draht. Die Standströme wurden über die Naben auf je 50A eingestellt; dafür reicht der Draht dicke aus, und es bleibt reichlich Platz für Kühlluft. Mit der Wicklung haben die Motoren ein kv von 651-654, Leerlaufstrom ist 0,9-1A an 11,3V. Betrieben werden sie an 5S 4500mah. Es wurden insgesamt 3 Triebwerke gebaut (Stand Februar 2013), zwei weitere sind in Arbeit. |
 |
|
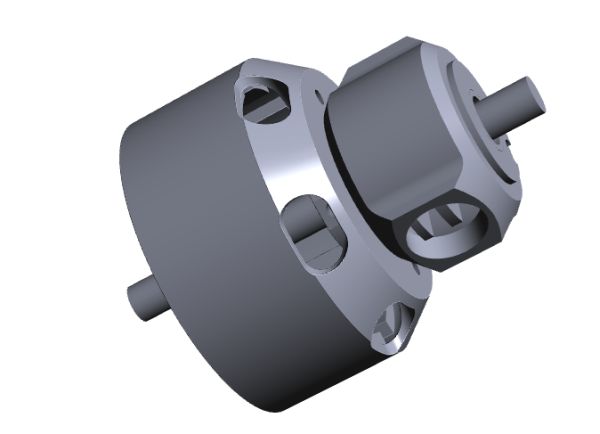  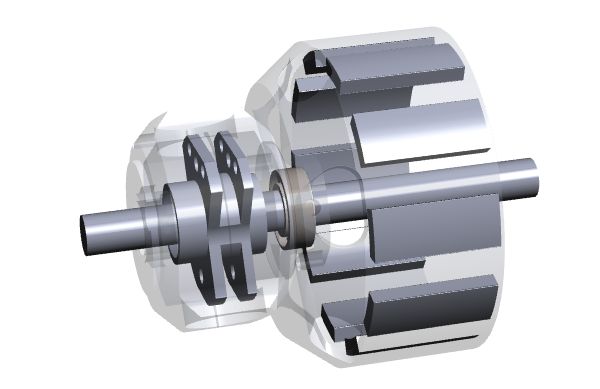 |
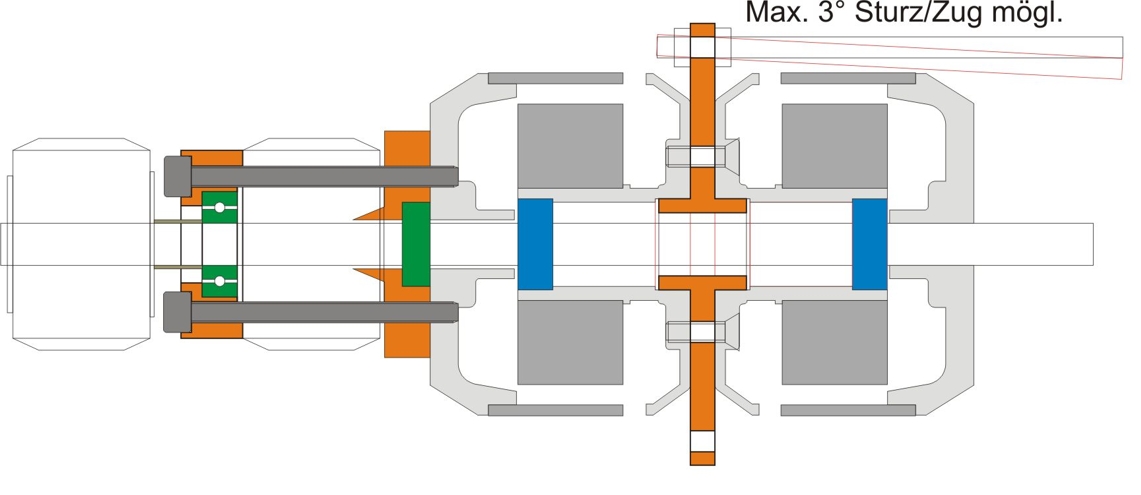
Mein Problem für die Gegenläufer ist: in eine Glocke muss innen ein Lager reinpassen. Da muss also genug Fleisch bleiben. Ich häng mal ein (3D-)PDF (screenshots)an, wie wir es dann letztendlich beim 4015 gelöst haben. So oder so ähnlich müsste es halt auch in den anderen Motor passen. Da ist es schick, wenn man das gleich bei der Herstellung eindrehen/-fräsen könnte. |
  |
Da geht ohne Logger mit Drehzahl-Funktion nichts, wenn man optimal unterwegs sein will. Anfang ist immer, den vorderen Prop auf die Wunschsteigung zu stellen, den hinteren etwa 1/2" mehr Steigung (das gilt hier gür 11" Durchmesser vorne, 10,1" hinten). Dann wird geflogen und Strom/Drehzahl der Einzelantriebe geloggt. Danach wird der hintere angepasst (meist zieht er noch zu wenig Strom). Für die Macchi sind wir bei 12" Steigung vorne und 17" Steigung hinten angekommen! (der hintere Prop alleine würde NIE aus dem Abriss kommen, da die Ramoser-Blätter dann schon SEHR steil stehen). Aber im Verbund mit dem vorderen geht das super. (Angaben laut Steigungslehre) Insgesamt ist die Abstimmung aber immer noch suboptimal; es gibt eben weder Messungen an Modellantrieben, noch Simulationen oder geeignete Blätter für die hinteren Propeller. |
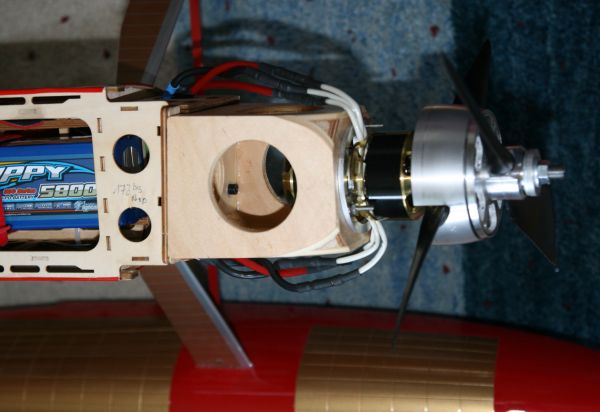 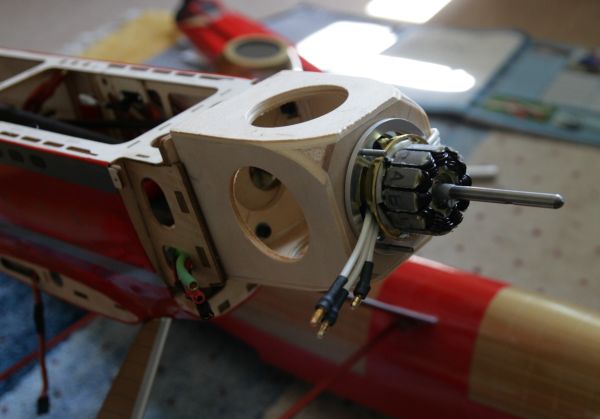 |
Der Einbau ins Modell.
Ihr seht: |
  |
Nun ist die Macchi ein ziemliches Dickschiff. Aus dem Karton kommt sie mit diesem Antrieb auf etwa 155km/h. Getunt (dünne Ruder-Abschlusskanten, abgedeckte Ruderspalte, Null Sturz nach oben) geht sie etwa 190. Und der Sound... geil! Hier noch der link ins Wasserflieger-Forum, wo ein wenig über die Macchi steht. |


|
Kunis Pogo, das ambitionierteste Projekt mit dem gegenläufigen Antrieb.
In der Pogo arbeitet der sebstentworfene kleine Scorpion-Gegenläufer auf Basis der 35er Statorgröße.
Kuni schreibt dazu: |